Fonction de Transfert et Analyse
Transformée de Laplace
Pour analyser les systèmes SLIT, la transformée de Laplace offre plusieurs avantages par rapport à l'utilisation directe d'équations différentielles. En effet, cette transformée permet de transformer des équations différentielles en équations algébriques, plus simples à manipuler.
Définition
Transformée de Laplace
La transformée de Laplace est définie comme une transformation intégrale qui convertit une fonction temporelle
où
Transformée de Laplace Inverse
La transformée de Laplace inverse est une transformation qui permet de revenir du domaine de Laplace au domaine temporel.
En pratique, la transformée de Laplace inverse sera le plus souvent obtenue en utilisant des tables.
Exemples
Exemple 1: Signal échelon
Considérons la fonction échelon unitaire
Rappelons que l'intégrale de
En évaluant cette expression entre les bornes
- Lorsque
, si . - Lorsque
, .
Pour
Exemple 2: Signal Exponentiel
Considérons le signal exponentiel
Nous obtenons alors
Les transformées de Laplace des signaux usuels sont souvent présentées dans une table.
Propriétés
La transformée de Laplace possède plusieurs propriétés qui permettent de simplifier significativement l'analyse des systèmes SLIT.
1. Linéarité
La transformée de Laplace est une opération linéaire :
où
Démonstration
Pour démontrer cette propriété, nous devons appliquer la définition de la transformée de Laplace à la fonction
2. Dérivation
La transformée de Laplace de la dérivée d'une fonction est donnée par :
où
TIP
Lorsque toutes les pré-conditions initiales sont nulles,
Démonstration
Nous allons démontrer ici la propriété pour
La transformée de Laplace de
En utilisant l'intégration par parties, avec
Ainsi, l'intégration par parties donne :
Évaluons le premier terme
- À
, si ne croît pas plus vite qu'une exponentielle, . - À
, .
Donc :
Ainsi, nous avons :
Donc :
3. Valeur initiale et valeur finale
- Théorème de la valeur initiale :
- Théorème de la valeur finale :
Démonstration
Les deux démonstrations reposent sur la propriété de dérivation. Soit
Par ailleurs, la propriété de dérivation en transformée de Laplace s'écrit :
- Valeur finale. Lorsque
, nous obtenons dans la première égalité :
De plus, en utilisant la seconde égalité, nous obtenons :
En regroupant les deux égalités, il en vient que
- Valeur initiale. Lorsque
, nous obtenons dans la première égalité :
En utilisant une intégration par partie, il est possible d'établir que :
De plus, en utilisant la seconde égalité, nous obtenons :
En regroupant les deux égalités, il en vient que
4. Intégration
La transformée de Laplace de l'intégrale d'une fonction est donnée par :
5. Théorème du décalage dans le temps
Si une fonction
où
Démonstration
Nous voulons trouver la transformée de Laplace de
Comme
Pour simplifier cette intégrale, nous faisons un changement de variable. Posons
Nous pouvons séparer le facteur exponentiel en deux termes :
Comme
L'intégrale
6. Multiplication par une exponentielle
La multiplication d'une fonction par une exponentielle se traduit par un décalage dans le domaine de la transformée de Laplace :
7. Théorème de convolution
La transformée de Laplace de la convolution de deux fonctions est le produit des transformées de Laplace de ces fonctions :
où
Analyse de circuits dans le domaine de Laplace
Un avantage majeur de la transformée de Laplace est qu'elle permet d'introduire la notion d'impédance généralisée pour les composants électroniques. Cette notion simplifie considérablement l'analyse des circuits électroniques.
Pour un composant passif, la relation entre la tension
où
- Résistance: Pour une résistance
, l'impédance généralisée est :
- Condensateur: Pour un condensateur
(avec pré-condition initiale nulle), l'impédance généralisée est :
- Bobine: Pour une bobine
(avec pré-condition initiale nulle), l'impédance généralisée est :
Fonction de transfert
Définition
La fonction de transfert du système est définie par :
désigne la variable de Laplace, désigne la transformée de Laplace de l'entrée, désigne la transformée de Laplace de la sortie.
Généralement, l'expression de
- à partir de l'équation différentielle en appliquant la transformée de Laplace sous l'hypothèse où les pré-conditions initiales sont nulles,
- à partir de l'analyse d'un circuit électronique en utilisant directement la notion d'impédance généralisée.
Exemple
Exemple 1 : À partir d'une équation différentielle
Soit l'équation différentielle de second ordre suivante :
En supposant les pré-conditions initiales nulles, nous obtenons dans le domaine de Laplace l'équation algébrique suivante :
En factorisant de deux côtés, il en vient que :
Exemple 2 : À partir de l'analyse du circuit
Considérons un circuit RC série avec :
- Une résistance
- Un condensateur
- Tension d'entrée
- Tension de sortie
aux bornes du condensateur

Les impédances généralisées sont :
En appliquant la formule du pont diviseur avec
Formes générales
Soit une équation différentielle linéaire à coefficients constants d'ordre
Cette fonction peut s'exprimer sous plusieurs formes.
Forme Polynomiale [ba]
Lorsque
En général, pour un système causal, le degré du numérateur
Forme Factorisée [zpk]
Le passage à la forme factorisée s'obtient en évaluant les racines du polynôme au numérateur et au dénominateur.
- le paramètre
est un coefficient d'amplification, - les zéros
correspondent aux racines du numérateur c-à-d aux solutions de l'équation
- les pôles
correspondent aux racines du dénominateur c-à-d aux solutions de l'équation
Forme SOS [sos]
Lorsque les pôles ont un ordre de multiplicité maximum de 2, il est possible de décomposer la fonction de transfert comme une multiplication de fonctions de transfert de 1er et 2nd ordres:
désigne un pôle réel, désigne un pôle complexe-conjugué, désigne l'ordre du système.
Diagramme des pôles et zéros
Le diagramme des pôles et zéros présente graphiquement la localisation des pôles (
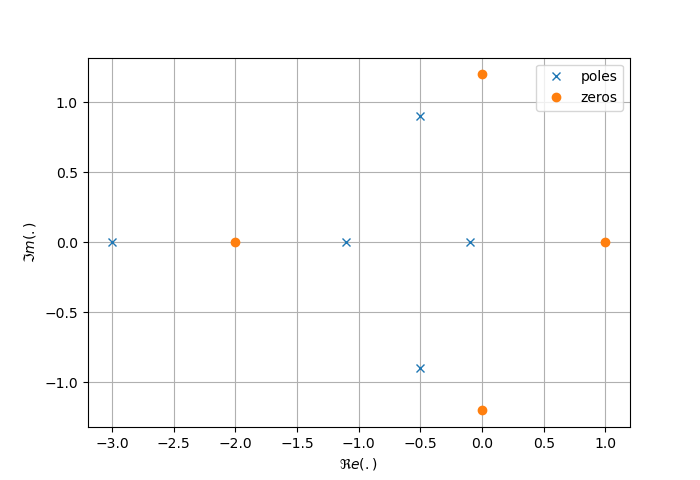
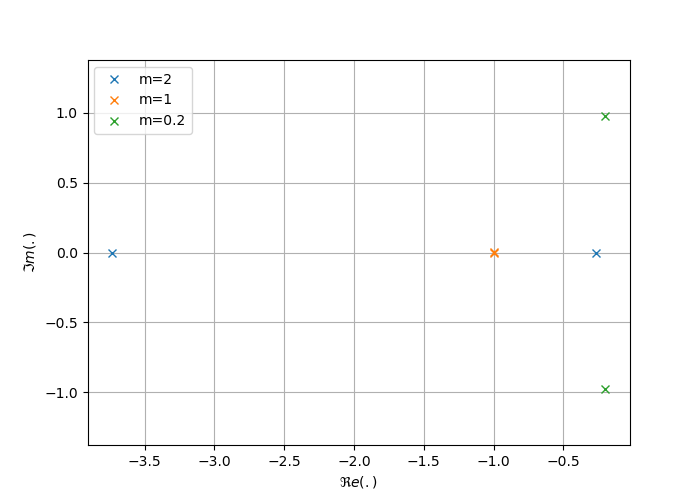
Exemple : Système d'ordre 2
Déterminons les pôles et zéros de la fonction de transfert de 2ème ordre suivante :
Cette fonction de transfert ne possède pas de zéro. Les pôles
Le discriminant est égal à
Suivant la valeur de
- Cas où
:
- Cas où
:
- Cas où
:
La figure suivante présente le diagramme des pôles pour les 3 cas.
Analyse temporelle
Méthodologie
Pour déterminer la sortie du système à une entrée quelconque, il est possible d'utiliser la méthodologie suivante :
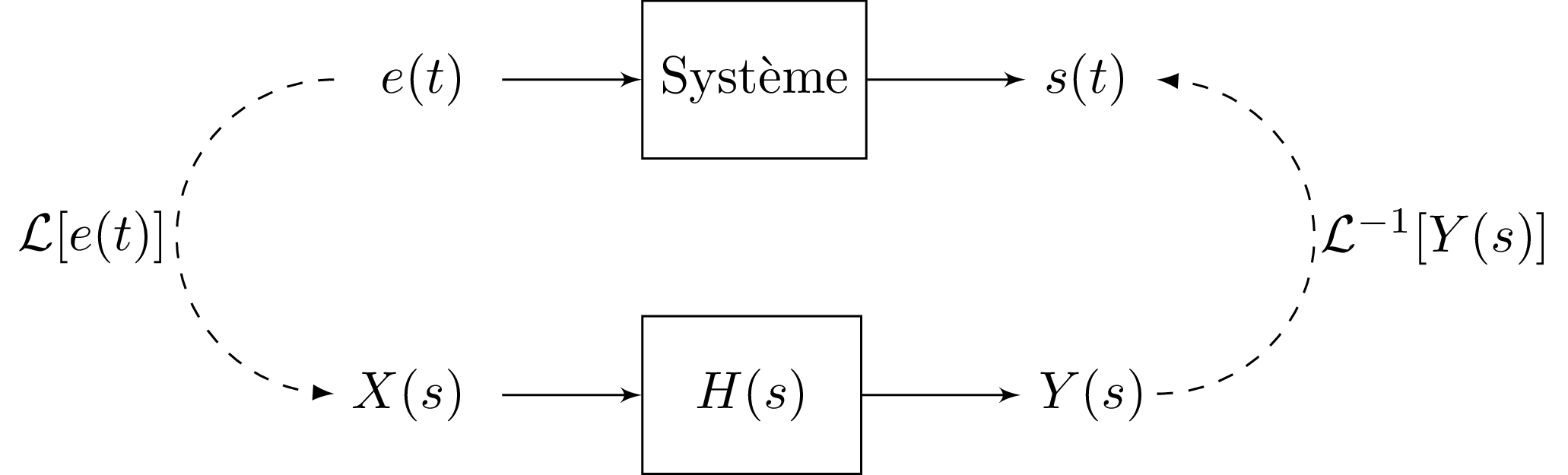
- Détermination de
, - Détermination de la fonction de transfert
, - Calcul de
, - Décomposition en éléments simples de
, - Détermination de la sortie
.
Exemple
Déterminons la réponse indicielle (
- La transformée de Laplace de l'entrée est égale à
(voir table) - La fonction de transfert est déjà déterminée,
- La transformée de Laplace de la sortie est égale à
- En utilisant une décomposition en éléments simples, cette transformée peut se décomposer sous la forme :
- La sortie s'exprime alors sous la forme :
En utilisant les tables des transformées, nous obtenons pour
Stabilité
Pour qu'un système soit asymptotiquement stable, il faut et il suffit que la réponse libre
TIP
Un système est stable si tous ses pôles sont à partie réelle négative.
Valeur Initiale
Le théorème de la valeur initiale permet d'obtenir rapidement la sortie initiale d'un système. Mathématiquement, la sortie initiale s'exprime sous la forme :
Valeur Finale
Lorsque la sortie converge vers une valeur finie, le théorème de la valeur finale permet d'obtenir rapidement cette valeur :
TIP
Lorsque l'entrée est un échelon d'amplitude
Analyse Fréquentielle
Les exponentielles complexes de la forme
Exponentielle Complexe
Lorsque l'entrée est une exponentielle complexe de pulsation
correspond à la fonction de transfert du système évaluée pour . Ce terme représente la réponse en fréquence du système, c'est-à-dire le gain complexe (amplitude et phase) que le système applique à l'entrée de pulsation .
TIP
Dans le domaine fréquentiel, le contenu fréquentiel s'obtient en évaluant la fonction de transfert en
Démonstration
Lorsque l'entrée s'exprime sous la forme
En factorisant et en simplifiant, nous obtenons
Il en résulte que :
En identifiant avec la forme de la fonction de transfert, il est finalement possible d'établir que
Sinusoïde
Lorsque l'entrée du système est une sinusoïde de pulsation
correspond à l'amplification (ou au gain) du système à la pulsation , correspond au déphasage du système à la pulsation .
Démonstration
La sinusoïde d'entrée peut se décomposer sous la forme de deux exponentielles complexes via la formule d'Euler :
- Pour le terme
, la solution particulière est :
- Pour le terme
, la solution particulière est :
En exploitant le fait que
Il en vient que :
et donc
Diagramme de Bode
Le diagramme de Bode présente graphiquement :
- l'évolution de
en fonction de (ou de la fréquence). Cette courbe est généralement représentée en utilisant des échelles logarithmiques pour le module et la pulsation - l'évolution de
en fonction de . Cette courbe est généralement représentée en degrés pour l'argument et en échelle logarithmique pour la pulsation.
Cette représentation permet de caractériser le comportement du système pour les différentes fréquences qui constituent le signal d'entrée. Le plus souvent, les axes des abscisses et des ordonnées sont représentés en échelle logarithmique pour mieux mettre en évidence certaines propriétés du système.
Notons que pour tous les systèmes réels (
Exemple : Diagramme de Bode d'un filtre RC passe-bas
Reprenons la fonction de transfert du filtre RC passe-bas établie précédemment :
Pour obtenir la réponse fréquentielle, nous remplaçons
Expression du module
Le module de
En introduisant la pulsation de coupure
En décibels (dB), le module s'exprime sous la forme :
Expression de l'argument
L'argument de
Nous pouvons analyser le comportement du filtre pour différentes plages de fréquences :
Basses fréquences (
) : Le module tend vers et l'argument tend vers . Le signal passe sans atténuation ni déphasage. À la pulsation de coupure (
) : Le module vaut (soit dB) et l'argument vaut . Hautes fréquences (
) : Le module tend vers et l'argument tend vers . Le signal est fortement atténué.
Ce comportement confirme le caractère passe-bas du filtre RC : les basses fréquences sont transmises tandis que les hautes fréquences sont atténuées.
Diagramme de Bode
La figure suivante présente le diagramme de Bode du filtre RC passe-bas avec
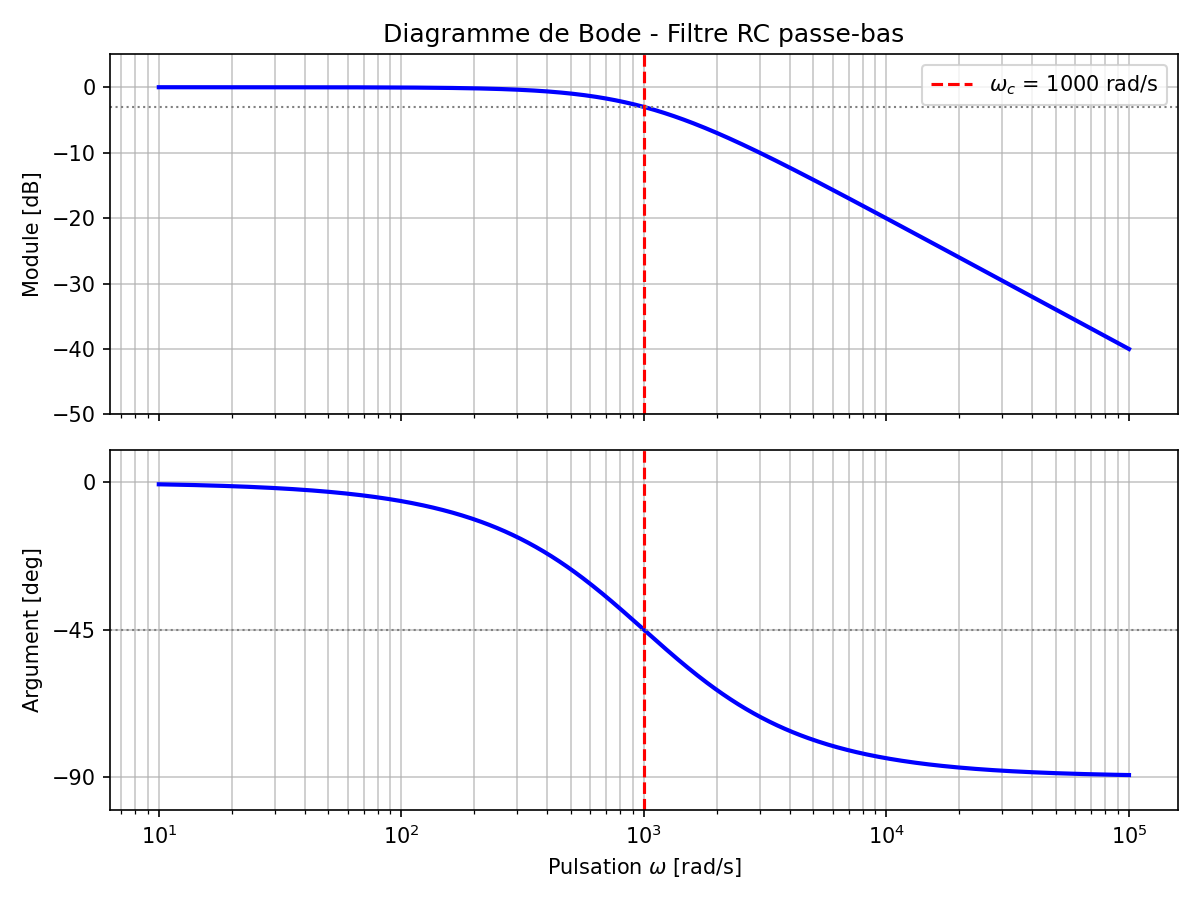
On observe bien :
- Un module proche de
dB pour , puis une décroissance de dB/décade pour - Un argument qui passe de
à , avec à la pulsation de coupure