Caractérisation et Identification
Ce chapitre présente les méthodologies permettant d'identifier les paramètres caractéristiques d'un système SLIT à partir de différentes représentations : diagramme des pôles et zéros, réponse indicielle ou réponse fréquentielle.
Objectifs de la caractérisation
La caractérisation d'un système consiste à déterminer ses propriétés fondamentales :
Caractéristiques temporelles
- Stabilité : Le système converge-t-il vers un état d'équilibre ?
- Présence de dépassement : La réponse dépasse-t-elle la valeur finale ?
- Temps de réponse à 5% : Temps pour atteindre définitivement ±5% de la valeur finale
- Amortissement : Caractère oscillatoire ou apériodique de la réponse
Caractéristiques fréquentielles
- Type de filtre : Passe-bas, passe-haut, passe-bande, réjecteur
- Amplification : Gain statique ou gain maximum
- Fréquence propre : Fréquence caractéristique du système
- Résonance : Présence et valeur du pic de résonance
- Comportement asymptotique : Pente en basse et haute fréquence
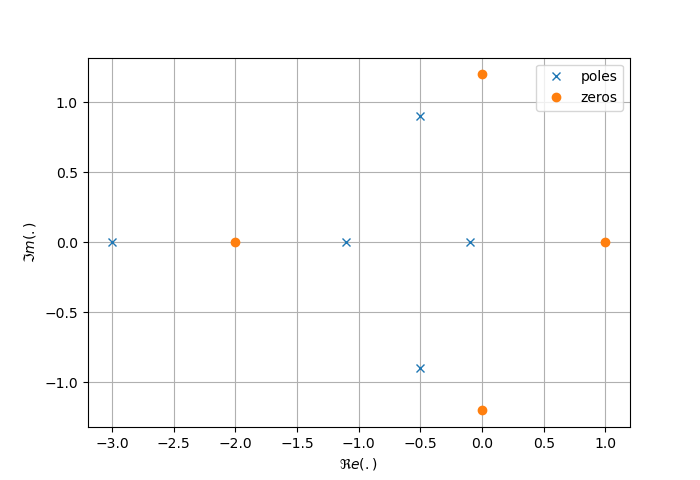
Identification à partir du diagramme des pôles et zéros
Le diagramme des pôles et zéros fournit une représentation visuelle qui permet d'identifier rapidement les caractéristiques principales d'un système.
Stabilité
Un système est asymptotiquement stable si et seulement si tous les pôles sont situés dans le demi-plan gauche du plan complexe, c'est-à-dire :
Règle pratique
- Pôles dans le demi-plan gauche → Système stable
- Pôle sur l'axe imaginaire → Système marginalement stable
- Au moins un pôle dans le demi-plan droit → Système instable
Type de réponse temporelle
La position des pôles permet de prédire le type de réponse temporelle :
Pôles réels
- Pôles réels négatifs : Réponse apériodique (exponentielle décroissante)
- Plus le pôle est proche de l'origine, plus la constante de temps est grande
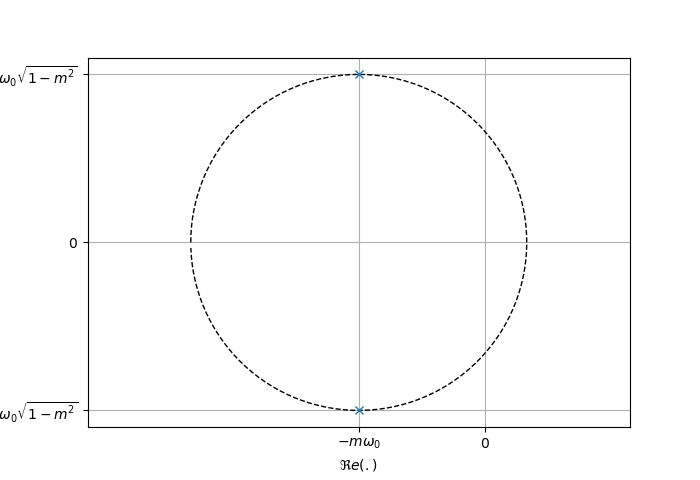
Pôles complexes conjugués
- Pôles complexes conjugués : Réponse oscillatoire amortie
- L'angle
avec l'axe réel négatif indique l'amortissement : - Plus les pôles sont proches de l'axe imaginaire, plus les oscillations sont persistantes
Identification des paramètres d'ordre 2
Pour un système de second ordre, les paramètres
Cas des pôles réels (
Cas des pôles complexes (
où
Type de filtre
La présence et la position des zéros permettent d'identifier le type de filtre :
| Configuration | Type de filtre |
|---|---|
| Pas de zéro | Passe-bas |
| Zéro à l'origine | Passe-bande |
| Deux zéros à l'origine | Passe-haut |
| Zéros sur l'axe imaginaire (±jω₀) | Réjecteur |
Identification à partir de la réponse indicielle
La réponse indicielle d'un système fournit des informations directes sur son comportement temporel.
Systèmes de premier ordre
Pour un système de premier ordre, la réponse indicielle d'un passe-bas s'exprime :
Méthode d'identification
Gain statique :
Constante de temps : Plusieurs méthodes possibles
- À
, la sortie atteint 63.2% de sa valeur finale - À
, la sortie atteint 95% de sa valeur finale (temps de réponse à 5%) - Méthode de la tangente à l'origine
- À
Systèmes de second ordre
Pour un système de second ordre de type passe-bas, l'identification dépend du régime.
Identification du type de régime
Observer la réponse indicielle permet de déterminer le coefficient d'amortissement :
- Pas de dépassement →
(régime apériodique) - Présence d'oscillations →
(régime pseudo-périodique)
Cas pseudo-périodique (
Méthode 1 : Dépassement et valeur finale
Gain statique :
Dépassement relatif :
En inversant cette relation :
- Pseudo-période : Mesurer le temps
entre deux pics successifs
Une fois
Méthode 2 : Ratio de dépassements successifs
Pour deux dépassements consécutifs
Lorsque
Méthode 3 : Utilisation d'abaques
Pour des mesures plus rapides, utiliser les abaques interactives qui donnent directement la relation entre :
et et
Cas apériodique (
L'identification est plus complexe. Une approche consiste à :
- Identifier le gain statique
- Ajuster numériquement les paramètres
et pour faire correspondre la réponse mesurée
Exemple d'identification
Considérons une réponse indicielle avec :
- Amplitude d'entrée :
V - Valeur finale :
V - Premier maximum :
V - Pseudo-période :
s
Étape 1 : Gain statique
Étape 2 : Dépassement relatif
Étape 3 : Coefficient d'amortissement
Étape 4 : Pulsation propre
Identification à partir de la réponse fréquentielle
Le diagramme de Bode permet d'identifier directement les caractéristiques fréquentielles du système.
Type de filtre
Le type de filtre se détermine par observation du comportement asymptotique :
| Comportement BF | Comportement HF | Type |
|---|---|---|
| Constant | Passe-bas 2nd ordre | |
| Constant | Passe-haut 2nd ordre | |
| Passe-bande 2nd ordre | ||
| Constant (avec creux) | Constant | Réjecteur 2nd ordre |
Systèmes de premier ordre
Passe-bas
Gain statique : Lire
en basse fréquence (en dB ou naturel) Fréquence de coupure : Fréquence où
(soit -3 dB du gain statique) Constante de temps :
Passe-haut
Gain haute fréquence : Lire
en haute fréquence Fréquence de coupure : Fréquence où
Systèmes de second ordre
Identification du gain
Selon le type de filtre :
- Passe-bas :
(gain basse fréquence) - Passe-haut :
(gain haute fréquence) - Passe-bande :
(gain à la pulsation propre)
Identification de la pulsation propre
Méthode 1 : Intersection des asymptotes
Les asymptotes basse fréquence et haute fréquence se croisent à la pulsation propre
Méthode 2 : Maximum de résonance (si
Si le système présente un pic de résonance :
- Passe-bas :
- Passe-haut :
Méthode 3 : Valeur à
Pour tous les types, à la pulsation propre :
Identification du coefficient d'amortissement
Méthode 1 : À partir de la résonance
Si
En résolvant :
Méthode 2 : Valeur à
Une fois
Pour un passe-bas :
Méthode 3 : Bande passante (pour passe-bande)
Pour un filtre passe-bande, la bande passante à -3 dB est :
Donc :
Exemple d'identification
Soit un filtre dont le diagramme de Bode montre :
- Gain basse fréquence :
(20 dB) - Pic de résonance à
Hz avec (28 dB) - Pente haute fréquence : -40 dB/déc
Identification :
Type : Passe-bas de 2nd ordre (gain constant en BF, -40 dB/déc en HF)
Gain statique :
Coefficient d'amortissement (à partir du pic) :
Pulsation propre :
Méthodologie générale
Pour caractériser un système inconnu :
Observer la représentation disponible (pôles/zéros, indicielle, Bode)
Identifier l'ordre du système (nombre de pôles)
Déterminer le type (passe-bas, passe-haut, etc.)
Extraire les paramètres selon la méthode appropriée
Vérifier la cohérence : Les paramètres identifiés doivent être cohérents entre les différentes représentations
Valider par simulation : Comparer les réponses simulées avec les mesures
Validation croisée
Il est recommandé d'utiliser plusieurs méthodes d'identification pour valider les résultats. Par exemple, les paramètres