Systèmes de Premier Ordre
Modélisation
Équation différentielle
L'équation différentielle d'un système de premier ordre peut s'exprimer sous la forme suivante :
désigne la constante de temps [s].
Fonction de transfert
La fonction de transfert d'un système de premier ordre peut s'exprimer sous la forme normalisée suivante :
désigne le numérateur de la fonction de transfert (polynôme de degré inférieur ou égal à 1).
Expression du pôle
Un système de premier ordre possède un unique pôle. Ce pôle s'obtient en cherchant l'unique racine du dénominateur de la fonction de transfert.
Exemples
Filtre Passe-Bas (LP1)
Circuit : Résistance
avec
Filtre Passe-Haut (HP1)
Circuit : Condensateur
avec
Réponse Temporelle
La solution complète de l'équation différentielle s'exprime sous la forme :
: solution libre (régime libre)
: solution particulière (régime forcé). L'expression du régime forcé dépend de l'allure de l'entrée et des coefficients et
Exemple : Réponse indicielle d'un passe-bas
Considérons la réponse d'un système de premier ordre à un échelon d'amplitude
La constante d'intégration s'obtient en déterminant une post-condition initiale. En intégrant l'équation différentielle entre
Pour un filtre passe-bas de premier ordre, la réponse du système à un échelon d'amplitude
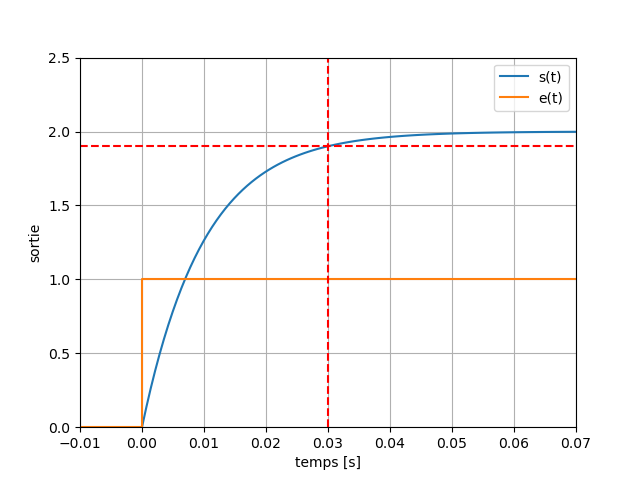
Valeurs Remarquables
- Post-condition initiale :
, - Valeur finale :
, - Valeur maximale:
, - Temps de réponse à
: .
Réponse Fréquentielle
La réponse fréquentielle s'obtient en posant
désigne la pulsation de coupure à -3dB [rad/s].
Passe-Bas
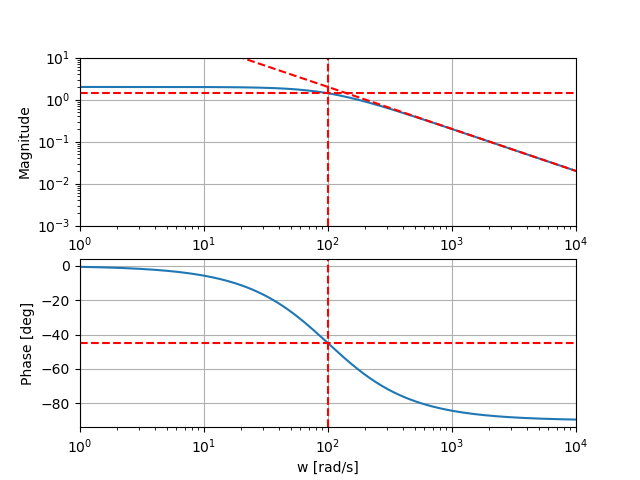
- Module :
- Argument :
Passe-Haut
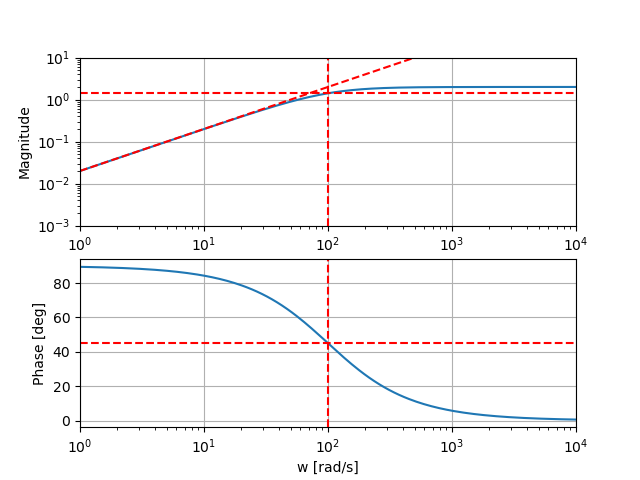
- Module :
- Argument :